
What are the Optimal Drone Flight Parameters for Fawn Rescue?
You probably know what it’s like: when one person mows, everyone mows! The time pressure involved in fawn rescue is sometimes extreme. That’s why high area coverage and optimally adjusted flight parameters are so incredibly important. But what are the optimal flight parameters?
Flight Altitude
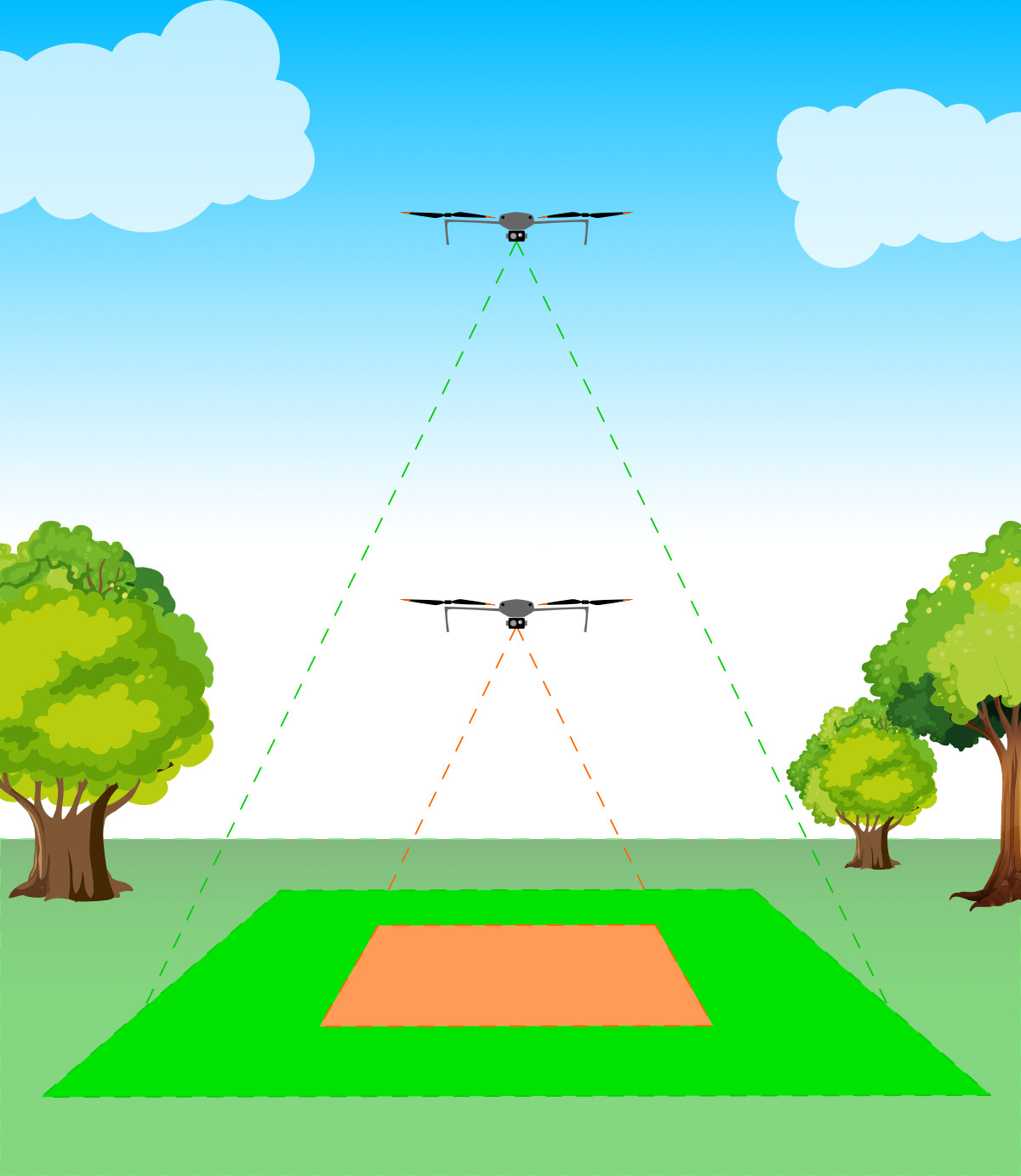
Let’s first consider the flight altitude. The higher the altitude, the greater the ground coverage, meaning we need fewer flight paths and are therefore faster overall. We have a higher area coverage. However, as altitude increases, the pixel ground resolution also deteriorates. We can see fewer details, which makes detection less reliable.
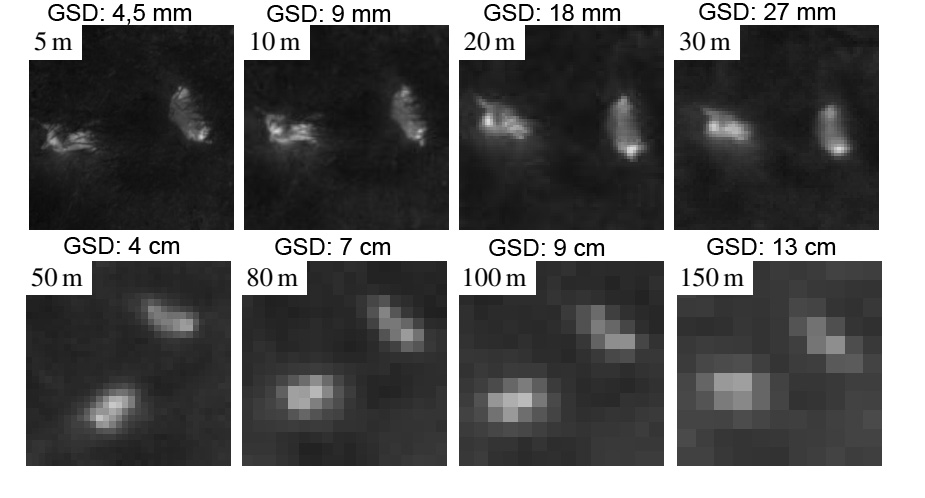
Here you can see two fawns, approximately three weeks old, from different flight heights. The images were taken with a thermal imaging camera equipped with a lens that is ideal for fawn rescue, with a horizontal field of view (hFOV) of 32°. Most drones today do not have an ideal lens, so you usually have to fly lower to achieve the same ground sampling distance (GSD).
The optimal ground sampling distance for fawn rescue is approximately 7 cm. Since fawns are usually circular and have a diameter of approximately 30 cm, they are then displayed on approximately 14 pixels. This is sufficient to distinguish the fawns from other objects, even in somewhat difficult conditions.
The DJI M2EA, M3T and M30T drones have an optimal GSD of 7 cm at a flight altitude of approximately 55 metres.
If you have a different drone, you can calculate the GSD using the following formula: GSD = h * s / f
h is the flight altitude, s is the detector element size and f is the focal length of the lens. If you only know the sensor width B and the horizontal resolution w instead of the detector element size s, you can calculate s as follows: s = B / w. Alternatively, you can also calculate the GSD using the hFOV of the lens, the flight altitude and the horizontal resolution w as follows: GSD = tan(hFOV/2)*2*h/w
Overlap
For mapping operations, you can set an overlap in the flight direction and a lateral overlap for the drones. The lateral overlap determines the flight path distance. The overlap in the direction of flight determines the percentage by which successive images overlap during mapping operations. However, it also influences the maximum flight speed, as saving the images takes a certain amount of time. To ensure that the set frontal overlap can be maintained, the drone must not fly too fast.

The optimal overlap for fawn rescue depends largely on the height of the vegetation. For example, if the grass is 1 metre high, the camera’s angle of view must not deviate more than 17° from the vertical. Anyone who has ever stood in a meadow with vegetation of this height knows how difficult it is to find a fawn at a distance of one metre. The tall grass quickly obscures the view.
So, if we assume one metre of vegetation and a fawn size of 30 cm, then the FOV must not exceed 2*17° = 34°, otherwise the grass will obscure the view, because even a thermal imaging camera cannot see through grass. The DJI M2EA, M3T and M30T drones have a diagonal FOV of 61° and thus a horizontal FOV of 47.6°. This means that in the case of high vegetation, fawns will not normally be found at the edge of the image, as the view is obscured by the grass. We therefore need at least 32% lateral overlap for the DJI drones. A little reserve should also be planned for, so a lateral overlap of 40% makes sense.
The formula for calculating the minimum lateral overlap ü is: ü = 1-k/(h*tan(FOV/2)), where k is the fawn size, h is the vegetation height, and FOV is the horizontal field of view.
For the frontal overlap, 60% is a good choice, as this means that each point is depicted in approximately three images.
Flight Speed
The optimum flight speed depends on how we analyse the images. When we view the video stream on the monitor (known as the LiveView method), our reaction time and concentration are the limiting factors. In practice, with a GSD of 7 cm and a camera with a resolution of 640 x 512 pixels, a flight speed of 3.5 m/s to 5 m/s has proven to be optimal for most pilots. Flying faster than this becomes very strenuous after a short time.
If we analyse the images after the flight (georeferencing process), motion blur in the images is the limiting factor. Motion blur depends on the integration time (similar to the exposure time in colour cameras). Most thermal imaging cameras have a fixed integration time of approximately 15 ms. At a speed of up to 4.6 m/s (at 7 cm GSD), motion blur remains within one pixel and is therefore not visible. However, motion blur of 1.7 pixels is usually still tolerable. At 7 cm GSD, this means a flight speed of 8 m/s is the maximum that can be flown in order to still obtain a sufficiently good image.
Calculation tools flight planning
In order to calculate the values described, we have put together various calculation tools for you.
Automatic flight planning with the POICloud
The POICloud is a software solution for professional operations in fawn rescue and species protection, but also in other areas of application. One function of the POICloud is fully automatic flight planning with precise terrain flight.
Automatic Flight Planning and Transfer
POICloud plans waypoint and mapping flights fully automatically based on configurable templates and automatically transfers the missions to all connected remote controls. You can create several templates for your areas, giving you the ideal flight parameters for your application scenario with minimal effort.
Mehr Informationen über die POICloud
Mehr Informationen über die POICloud und unsere App und Desktop-Software findet ihr auf der Seite POISuite.
Die POICloud kostenlos erhalten
Mit jeder Drohne von uns erhältst du dauerhaft kostenlos unser Softwarepaket POISuite – eine leistungsstarke Lösung, die weit mehr kann als eine herkömmliche Drohne.